ロボット・マニピュレータによる遠隔操作技術は、廃炉だけでなく、災害時の復旧作業をはじめ、危険試料の取り扱いなど広い分野で応用が可能な技術です。
長谷川研究室では、これらに対して、ユーザー側からの視点で必要となる技術を見定め、その基盤・基礎の知見を深めるための以下の様な研究を進めています。
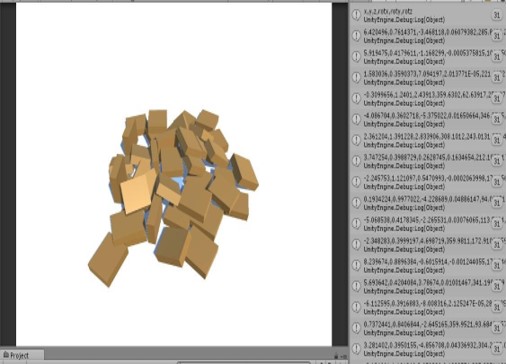
・コンピュータシミュレーションによるプラットホームの構築
・マニピュレータを利用するための実験施設の構築
物体の解体・撤去
例)ランダムに重なった物体の下から、特定のものを拾い出すために必要となる考え方をシミュレーションを用いて明らかにする。
物体相互の関連性
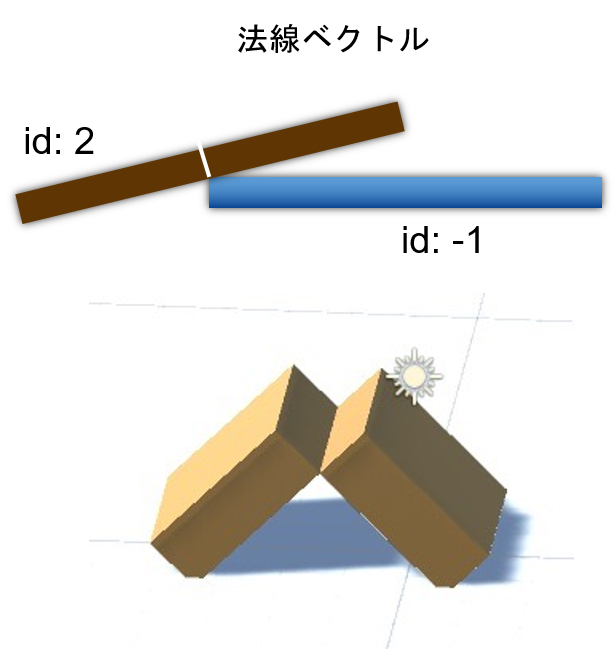
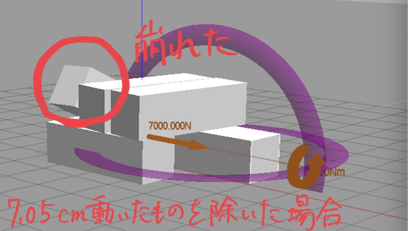
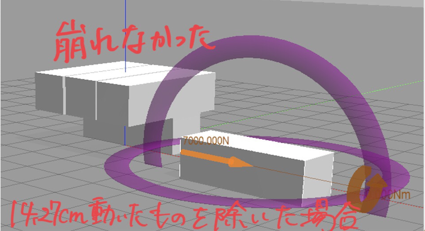
安定(安全)操作のための条件確認
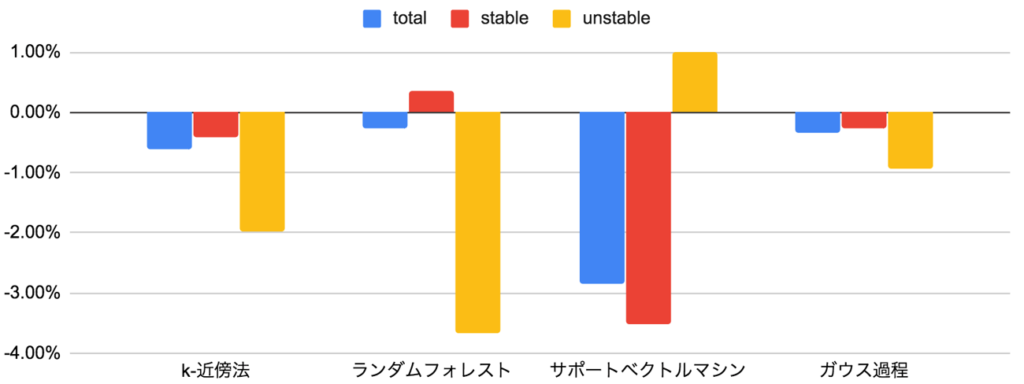
遠隔操作を利用する場合、危険な現場や物質を取り扱うことが多いため、その操作が安定的に行うことができるかどうか、という判断が必要となる。
それを数理的手法で判断することが可能であるか、既往の機械学習での手法を対象に検討を行っています。